某智慧叉车在5G网络与Wi-Fi网络下的应用对比
来自知识星球

某智慧叉车在5G网络与Wi-Fi网络下的应用对比

一 5G网络建设
当前,自动导引运输车辆(Automated Guided Vehicle,AGV)通信系统构建主要有连续式和分散式两种
1.连续式通信布局
- 允许AGV在任何时候和相对地面控制器的任何位置使用射频方法,或使用在导引路径内埋设的导线进行
感应通信,例如,采用无线电、红外激光的通信方法。
无线点主要采用Wi-Fi模式来导引AGV,主要受制于通信干扰以及传输距离问题,设备控制能力下降;红
外激光在线实时双向数据通信距离可达120m,但是激光功率一般每隔15m~20m接力一次,易造成光
损、通信中断且设备成本高昂。
2.分散式通信布局
- 在预定的地点(例如,AGV机器人停泊站)为特定的AGV与地面控制器之间提供通信,这种通信一般通
过感应或光学的方法来实现。
分散式通信的缺点是AGV在两通信点之间发生故障时,将无法与地面控制站取得联系。
目前,大多数AGV采用分散式通信方式,主要原因在于价格较便宜且发生两通信点间的故障问题较少。
随着产业需求升级,以往无人AGV固定线路越发难以满足实际生产需求,更加复杂的生产环境对智能化
AGV的需求越发明显。在此背景下,AGV需要自动完成运行线路的选择、运行速率的选择、自动卸载货
物、运行方向上小车的避让、安全报警等,当前主要采用的方案有纳米波、红外线激光雷达以及全景相机
云化视觉方案,均对网络时延、上下行带宽提出了较高需求。某智慧叉车园区为适应工业化、智能化制造
发展,在其园区基本建立无线Wi-Fi覆盖为主的内联网,同时建设3个5G宏站完成园区全网络覆盖,同时
部署MEC打造5G+智能叉车AGV测试和试验环境。
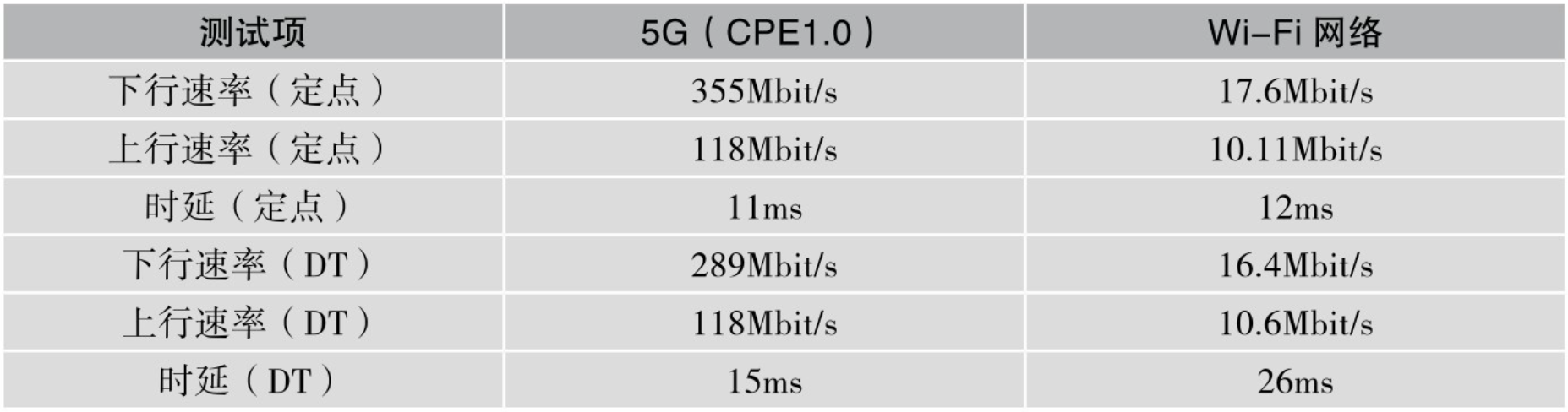
某智慧叉车网络测试指标对比见下表。
表格:某智慧叉车网络测试指标对比
二 测试环节搭建
采用两种组网方式进行对比试验:一种基于5G的网络;另一种基于Wi-Fi网络。
某智慧叉车园区新建5G通信网络分布如图1所示,两种不同AGV通信系统架构示意如图2所示。

图1:某智慧叉车园区新建5G通信网络分布
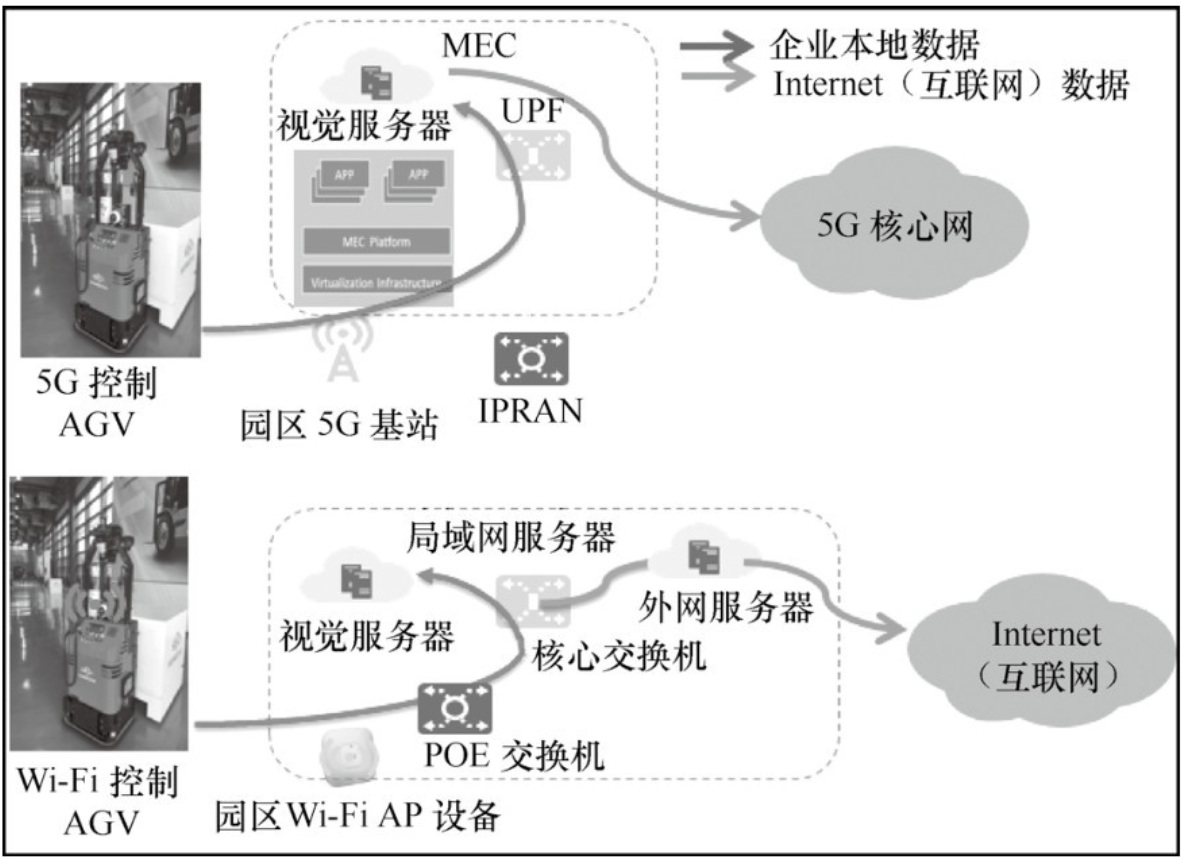
图2 两种不同AGV通信系统架构示意
通过同一测试环境,AGV连接两种不同通信方式进行远程设备控制,在同一对比环境下,单用户、多用户
可测试其定点上下行实时峰值带宽、定点时延、移动性上下行均值速率、移动性控制时延。
三 实际场景测试对比
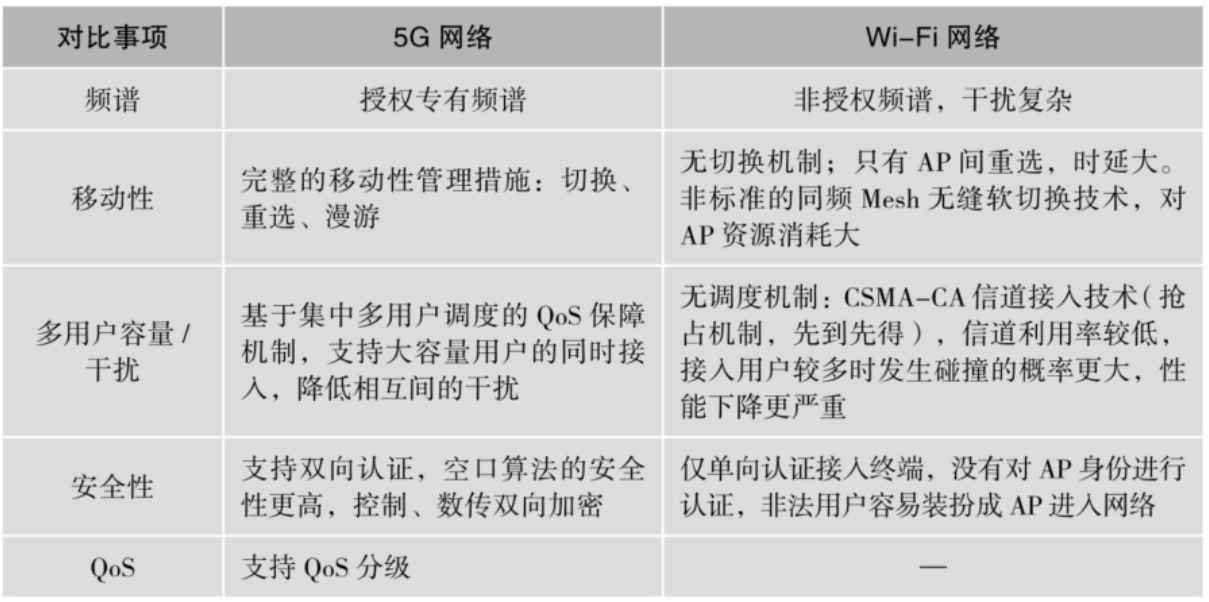
通信基础网络技术理论对比分析见下表。
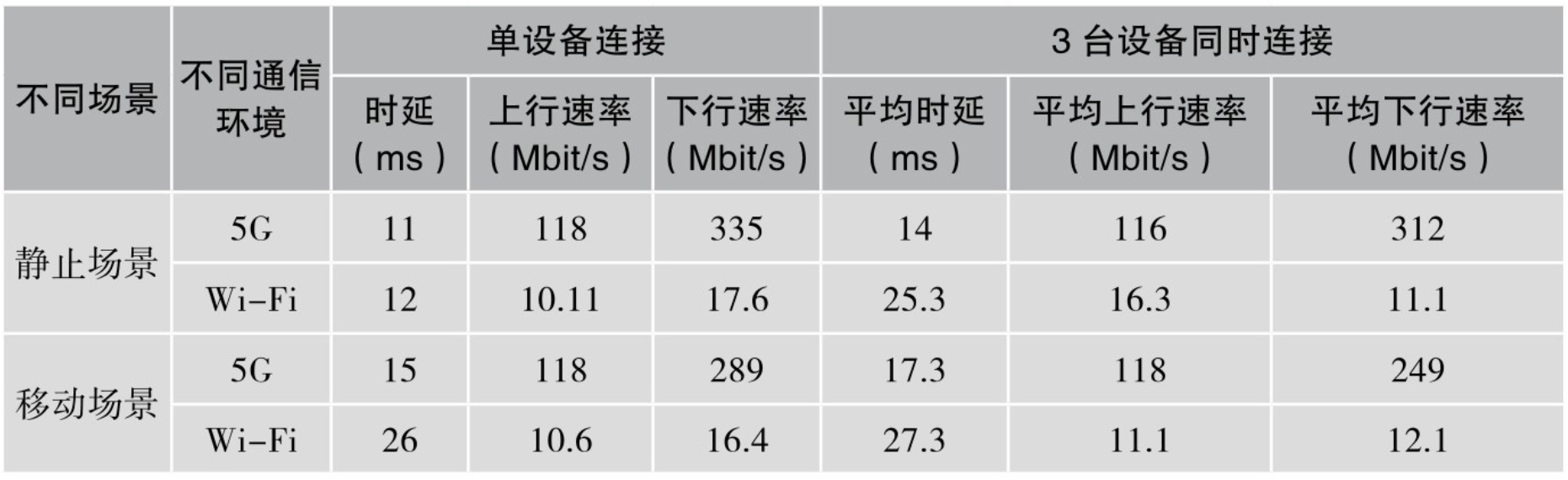
在不同的通信环境下,设备接入网络各项指标对比情况见下表。
在不同的通信环境下,时延对比如图3所示。
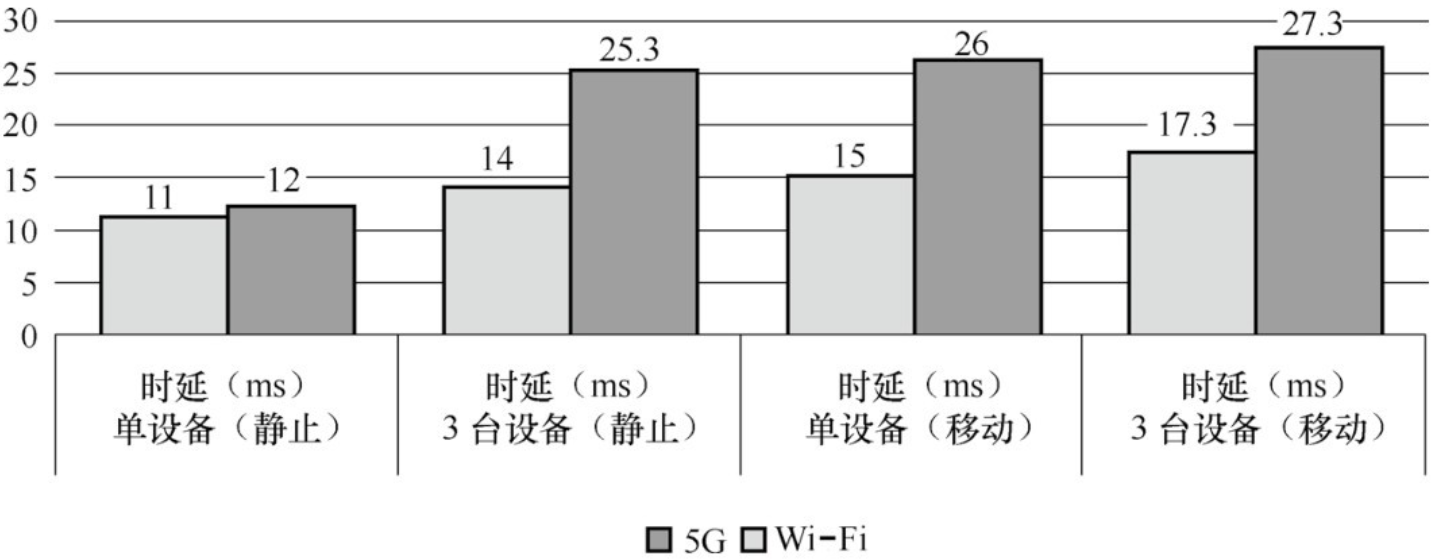
图3 在不同的通信环境下,时延对比
在不同的通信环境下,速率对比如图4所示。

图4 在不同的通信环境下,速率对比
各项测试结果分析如下所述。
(1)时延
- AGV的运行需要和控制平台保持通信,如果网络信号不佳,时延大于50 ms,AGV就会停止行驶,待网络
恢复后才会继续行驶。
现场测试的结果表明:如果是单设备静止连接的情况,连接Wi-Fi和5G的时延差别不大,均在20ms以内;
但在多设备同时连接的移动场景,Wi-Fi的时延比5G要长70%左右,而5G的时延能稳定在20ms内。
(2)带宽
- 目前,AGV的运行只是传递小的文件数据,对网络带宽的要求不高,但后续如使用视觉导航技术,则对
上行带宽的要求较高,至少要保证每路30Mbit/s的上行带宽。
实测发现,目前Wi-Fi的上行带宽均没有超过20Mbit/s,而5G的上行带宽移动在100Mbit/s以上,足以保证
视觉导航的网络要求。
(3)容量
- 当前测试环境局限于小范围连接测试,对网络容量的需求不高,后期所有AGV终端接入通信网络对整个
设备容量体验提出新要求,而目前AP设备可接入的用户数量有限且无法避免多用户之间通信的干扰,而
5G网络利用其独有波束赋型能够变干扰为有效信号,可以解决反射、绕射多径问题。
(4)安全
- 5G通信凭借其专有频段以及更高的数据安全通信协议保障,在用户生产信息保障、阻止外部非法接入、
数据分流等方面比Wi-Fi更加稳定可靠,而5G+MEC方案能保障各类生产数据处理在园区本地闭环。